دانلود تحقیق و مقالات رشته پزشکی با عنوان دانلود مقاله دست مصنوعی سیبرنتیکی در قالب ورد و قابل ویرایش و در ۵۹ صفحه گرد آوری شده است. در زیر به مختصری از آنچه شما در این فایل دریافت می کنید اشاره شده است.
دست مصنوعی سیبرنتیکی
مقدمه
انسان از دیر باز در جستجوی رفع معلولیت خویش بوده است و برای معلولیت عضوهایی مانند دست و پا،قطعات چوب و فلز را برای جایگزینی این اعضا استفاده نموده است.اما بطور مشخص پیشرفت تکنیک طراحی پروتز دست به روش الکتریکی بعد از جنگ جهانی دوم آغاز گردیده است.
فعالیت ساخت اندامهای مصنوعی (Artifitial organs) بیشتر مقارن با جنگهای بزرگ یا بعد آن بوده است که تعداد زیادی از جوانان قوی و نیرومند در صحنه های نبرد و یا مردم معمولی درزمان بمباران شهرها و یا در حین عمل جراحی دچار قطعی عضو می شوند و نیاز مبرم به اندام مصنوعی پیدا می کنند.
برای یک نوع اولیه، که به پای چوبی (peg-leg) یا دست چنگکی (Hook Hand) معروف بود، تاریخ ۱۸۶۶ ذکر گردیده است. بعد از جنگ جهانی دوم و با توجه به تعداد زیاد معلولین نوع دیگری از اندام مصنوعی بنام پروتز متصل به کابل cable connected prostheses طراحی وساخته شد کابل موجود در این پروتز به منظور محکم کردن انتهای اندام به سوکت (socket) و همچنین لنگر انداختن کابلهای عمل کننده بکار میرفت.
در معلولین زیربازو (Below-ElbowAmputtes) چرخش شانه سبب کوتاه شدن کابل وباز شدن انتهای وسیله ی چنگکی شکل می شود و در معلولین بالای بازو (Above-1bow Amputees) براساس اینکه مفصل آرنج به وسیله کابل دیگری با حرکت بالارفتن شانه قفل شده است باشد با حرکت چرخشی شانه می توان دو حرکت باز شدن وسیله یا جمع کردن آرنج را انجام داد.
در ۱۹۴۸ R.Ritter یک پروتز مایوالکتریک دست را بنمایش گذاشت تا کارگرانی که در کارخانه دچار نقض عضو شده اند از آن استفاده کنند ولی استقبالی از این پروتز صورت نگرفت و باید توجه داشت که مطلوب بودن پروتزهای سنتی دست، در مجموع کم است.
ویتالی (VITALLY) و دستیارانش طی بررسی گزارشی داند که هفتاد درصد معلولین دست، این پروتزها را نپذیرفته اند این نتیجه شگفت انگیز را می توان چنین توجیه کرد که فقدان یک دست زندگی انسان را مختل نمی کند ومانع کارایی آن نمی شود البته معلولیت بنحوی سبب محدود شدن به زحمت افتادن وفشار روانی می گردد، اما اگر پروتز فایده قابل توجهی برای معلول نداشته باشد او ترجیح میدهد که بدون استفاده از ان به زندگی خود ادامه دهد، بخصوص اینکه ا ستفاده از آن برای او مشکل ظاهری و نحوه بکارگیری آن باعث جلب توجه دیگران شود.البته در جهت رسیدن به فایده های بیشتر در دست مصنوعی، پس از توسعه تکنولوژی الکترونیک مسئله استفاده از سیگنالهای مایوالکتریک در کنترل دست مصنوعی مطرح گردید.
تحقیقات اولیه توسط Reltter و در ادامه آن korbinsky در شوروی منجر به ارائه اولین سیستم کنترل مایوالکتریکی با کاربرد کلینیکی گردید واز آن پس تاکنون در کشورهای مختلف جهان از قبیل کانادا- سوئد- یوگسلاوی-ایتالیا-آمریکا –انگلستان به طراحی و اصلاح سیستم کنترل مایوالکتریک در پروتزهای دست پرداختها ند ودر این طراحی ها سیگنال ورودی الکترومایوگرام نقش کنترل کننده ON/OFF را برای راه اندازی موتور محرکه پروتز دارد.
در این روش ساده از الگوریتم های شناخته الگو وروش های پیچیده پردازش سیگنال استفاده نمی گردد بلکه از هر محل الکترود برای کنترل تنها یک حرکت استفاده می شود.
هم اکنون این روشها بطور موفقیت آمیزی برای طراحی وساخت پروتزهای دست مورد استفاده واقع شده اند. بخصوص در مواردیکه یک یا دو حرکت مورد نظر باشد، این پروتزها توسط معلولین بکار گرفته شده اند.
یک پروتز دست مصنوعی برای اینکه بتواند بخوبی و بطور کلینیکی توسط معلولین پذیرفته شود باید دارای خصوصیاتی باشد که در بسیاری از موارد از نظر تکنولوژی وطراحی با یکدیگر متناقض می باشد برای مثال دست مصنوعی از یک طرف می بایست دارای قیمت و وزن مناسب باشد و حالات زیبایی در آن رعایت گردد و و از یکطرف باید بسادگی قابل کنترل باشد وفرد معلول بایستی بتواند با حداقل خطای ممکن حرکت پیش بینی شده را بدون نیاز به تمرکز فکری زیاد که موجب خستگی وی شود، انجام دهد که معنی پیچیده شدن بیشتر سیستم، گرانی و پرمصرف بودن آن وسنگینی پروتز می باشد.
یک پروتز دست باید حتی المقدور حرکات عملکرد آن شبیه دست سالم بوده و نسبت به دستورالعمل های ارسالی از سوی فرد معلول بلادرنگ عمل نماید وبطور کلی یک پروتز دست نه فقط بر مبنای شاخص های مکانیکی بلکه براساس اینکه در مجموع سیستم انسان- ماشین قابل قبول واقع گردد، مورد ارزیابی وقضاوت قرار میگرد.
پیچیدگی عملکرد پروتز دست مصنوعی در قدم اول مستقیما متناسب با مقدارو سطح معلولیت دست می باشد زیرا که با افزایش سطح معلولیت پروتیز می بایست قادر به انجام توابع حرکتی پیچیده تری باشد.
از اولین دستهای ساخته شده تا دستهای نوین امروزی، دو حرکت عمده به چشم می خورد:
یکی شناخت دست طبیعی و چگونگی عملکرد آن و دیگری کنترل حرکت اولین حرکت منجر به ساخت دستهای تکامل یافته تر نظر Epp ,EMG گردید وحرکت دوم با توجه به تکنولوژی روز به بهبود کنترل پرداخته است.
با وجود پیشرفت های بسیار در زمینه کنترل دستهای تولید شده امروزی فاقد کنترل کننده های نوین می باشد زیرا:
۱-بکارگیری یک زمینه تئوری در کار عملی به ویژه کاربردهای خاص نیاز به افرادی دارد که در هر دو زمینه آشنایی کافی داشته باشند( نظیر کنترل ومهندسی- پزشکی)
۲-دست مدد جو به صورت سیرنتیکی عمل می کند و نظیر ربات حرکات آن از قبل تعریف شده نمی باشد. از این رو در کار کنترل علاوه بر محدویت زمانی (به جهت عملکرد بی ورمک) باید قابلیت یادگیری در سیستم وجود داشته باشد تا در طول زمان بکارگیری دست ساده تر باشد.
۳-به دلیل محدودیت فضا ووزن به جهت استفاده از موتور- منبع تغذیه-مدارهای واسط کنترل کننده های میکروپروسسوری و حسگرهای لازم به کارگیری اکنترل کنترل کننده های قوی تاکنون مقدور نشده است.
اولین واصلی ترین گام در جهت ساخت دست مصنوعی از آن رو صورت گرفت که فرد مددجو را از نظر روانی تقویت نماید تا بتواند نبود دست را جبران کند.
و شاید به همین دلیل دست های زینتی برای جبران صورت ظاهری معلول ساخته شد بدین لحاظ این تکامل دست مصنوعی از دست چوبین و چنگکی تا دستی که تا حد امکان قادر به حرکاتی مشابه وکات طبیعی باشد و کاربرد آن به وسیله شخص مددجو محتاج به تمرین دقت و تمرکز خاص نباشد صورت گرفته است.
مهندسین درتلاش هستند تا به کمک تکنیکهای مختلفی از قبیل شناخت الگوهای پردازش دیجیتالی سیگنالها و روش های هوش مصنوعی و شبکه های عصبی (Neural Network) به شاخص وعملکردهای مطلوبی برای افراد معلول در کنترل دست مصنوعی دست یابند.
در این مقاله سعی شده است مقایسه بین انسان و ماشین وهمچنین سیر تکاملی دست مصنوعی تعقیب گردد و با بررسی عمیق تر سیگنال الکترومایوگرام و دریافت پردازش آن سعی شده است راه عملی را برای گروهها وتیم های بعدی جهت کار بر روی دریافت سیگنال وتقویت وپردازش و تعیین شناخت الگوهای حرکتی و نهایتا راه اندازی دست با کنترل ارادی هموار گردد.
البته قبل از ۱۹۴۰ این تصور که بتوان فرمان مغز رادر عملکرد دست مصنوعی بکار گرفت غیر ممکن می نمود اما باید اعتراف کرد که علیرغم پیشرفت های زیاد در حرکات ارادی دست مصنوعی سیبرنتیک هنوز تا کامل شدن پروتز راه بسیاری در پیش رو است وگاها شاید آهنگهای ناامیدی در عمل بگوش می رسد.
البته باید گفت از عمده ترین مسائل در این پروتز الگوریتم شناخت الگوی سیگنال است که امیدوارم با شروع این حرکت در دانشکده مهندسی دانشگاه آزاد اسلامی واحد تهران مرکزی با استفادهاز تجارب موجود در کشور حرکت به سمت این تحول ادامه یابد.
حرکت در این مسیر، دریافت سیگنال بدون خطاو نصب راحت الکترودها به معلول و انتقال فرمان به موتورهای DC وقسمت های مکانیکی می باشد که نهایتا سعی بر ساخت یک دست مصنوعی شبیه دست طبیعی و با وزن وقدرت نسبتا متناسب با دست طبیعی می باشد.
بررسی عملکرد دست طبیعی
زمانی که سخن از دست مصنوعی با کنترل ارادی گفته می شود باید ابتدا محدوده کار ،توانایی ها ،پارامترها و چگونگی دست طبیعی مورد بررسی قرار گیرد.
شناختی حتی بسیار گذرا و سطحی از دست طبیعی دنیایی از آگاهی و هوشیاری را پیش رو قرار می دهد.
گیرنده های بسیار حساس که وزن، موقعیت، فشار،گرمی، سردی، سرعت … را به مراکز بالاتر گزارش می دهند به قدری پیچیده هستند که باوجود تحقیقات دامنه دار هنوز بسیاری از این گیرنده ها وحس گرها ناشناخته مانده اند.
کنترل قسمت های گوناگون بدن بخشی ویژه از مغز را به خود اختصاص می دهد، میزان وسعت اشغال مغز بستگی سیستم به پیچیدگی سیستم کنترل دارد و هر چه سیستم کنترل بکار گرفته پیچیده تر باشد وسعت بیشتر اشغال می شود.
شکل مغز
مخچه بخشی از مغز است که نقش اصلی آن شرکت در اجرای ماهرانه حرکات ارادی است بعد از اراده انجام یک حرکت و ووقوع آن خطای حاصل شده در حین حرکت باعث یادگیری می شود. این کار در قشر مخچه صورت می گیرد، از این رو مخچه می تواند در حرکات ارادی ماهرانه شرکت کند.
با اجرای یک سری فرآینداه مخچه مختصات جهان خارج وتوابع عملکرد اعضای بدن را به جهان داخلی تصویر نموده و در خود حفظ می کند.
بدین ترتیب به نوعی وارون سیستم در قشر مخچه تشکیل می گردد که قابل استفاده برای قشر حرکتی مخ و ایجاد حرکات ماهرانه می باشد.
بافت های عصبی درون قشر مخچه در تمام قسمت ای گوناگون آن یکسان می باشد. قشر مخچه قابل تقسیم به بخشهای کوچکی به نام میکروزون است که هر کدام وظایف خاص خود را به عهده دارند.
دانشمندان در ترسیم قشر حرکتی مخچه سعی در یادگیری چگونگی مکانیزم حرکتی آن نموده اند.
ایتو در کتاب خود سعی نموده است عملکرد نرونهای داخل میکروزونها وچگونگی مکانیزم یادگیری آنها را تبیین نماید و در عین حال مخچه را بصورت یک مدار جبران کننده در مسیر «جلورو» و درکنار کنترلر اصلی حرکات ارادی تصویر نموده که براساس خطای میان حرکات اراده شده و تحقق یافته پارامترهای آن تنظیم می شوند و به همراه قشر حرکتی مخ یک سیستم کنترل تطبیقی تشکیل می دهند.
کاواتو مدلی از مخچه ارائه نموده که ذاتا محاسباتی است ومعتقد می باشد مخچه حیوانات توسط یادگیری یک مدل داخلی از دینامیک وارون موضوع مورد کنترلش بدست می آورد و با داشتن مدل وارون از سیستم می توان یک کنترل کننده ایده آل بدست آورد که یک حرکت ماهرانه را بدون نیاز به فیدبک محقق می سازد او معتقد است برای انجام یک حرکت ارادی لازم است کارهای زیر صورت بگیرد:
۱-تعیین مسیر حرکت دلخواه در دستگاه مختصات بینایی
۲-نگاشت دستگاه مختصات بینایی به دستگاه مختصات بدن
۳-صدور دستورهای لازم برای انجام حرکت
براساس نظریه کاواتو در ابتدا فرد با استفاده از فیدبک چشمی سعی می نماید خطای میان حرکت اراده شده و انجام گرفته را کاهش دهد. از این رو در گام اول برای انجام یک حرکت مطلوب در مسیر مشخص براساس دستگاه مختصات بینایی تدوین میگردد اما ضرورت انجام چنین حرکتی زوایا وگشتاورهای خاصی را در اعضای بدن می طلبد.
از این رو نگاشتی صورت گرفته و دستگاه مختصات بینایی به مختصات بدن تبدیل می شود.
حال که معلوم می گردد اعضا باید چه زوایا وگشتاورهایی داشته باشند فرمانهای لازم توسط سیستم عصبی به ماهیچه های مربوط صادر میگردد.
اگر فرد اراده کند لیوان آب را به سوی دهان ببرد. در ابتدا مسیر حرکت توسط چشم تعیین می شود. برای انجام این حرکت لازم است در لحظه به لحظه زمان زوایا و گشتاورهای لازم توسط بازو،ساعد ومچ تولید گردند. پس از مشخص شدن زوایا وگشتاورها ،فرمانهای لازم در لحظه لحظه زمان به ماهیچه های دیگر در حرکت بازو، ساعد ومچ صادر می شود.
به مرور زمان و با انجام چنین حرکتی مدل وارون در مغز شکل می گیرد.
باشکل گیری مدل وارون انجام چنین حرکاتی به صورت ماهرانه امکان پذیر می گردد.
محتوی فرمانهای صادره از سیستم عصبی به ماهیچه گویای چگونگی عملکرد آن عضو است از این رو شناخت این فرمانهای می تواند کمک موثری در شناخت عملکرد اعضا باشد.
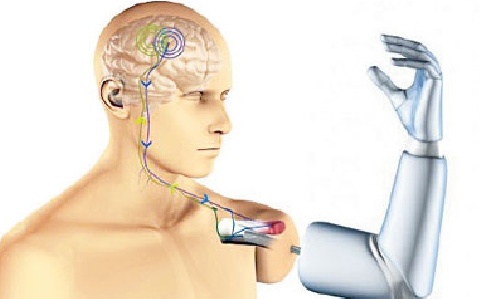
عامل فرمان در دست سیبرنتیکی، سیگنالهای EMG عضو باقی مانده یا عضو جایگزین می باشد که در هر ۲/۰ ثانیه تولید می گردد.
تاخیر زمانی مربوط به متوسط تاخیر فیزیولوژیکی بدن می باشد در طی این زمان فرمان صادره از مغز به عضو مورد نظر می رسد.
![]()
![]() فرمت فایل: WORD
فرمت فایل: WORD
![]()
![]() تعداد صفحات: 59
تعداد صفحات: 59
مطالب مرتبط