دانلود پروژه روبات تعقیب خط
روبات تعقیب خط چیست
روبات تعقیب خط ماشینی است که می تواند یک مسیر را دنبال کند. مسیر می تواند مرئی باشد مانند یک خط مشکی بر یک سطح سفید (تعقیب خط) و یا نامرئی مانند یک میدان مغناطیسی در فضای ازاد باشد. هدف طی مسیر بابیشترین سرعت و کمترین خطا نسبت به مسیر تعیین شده است. کاربرد های عملی یک چنین روباتی شامل اتومبیل های خودکار که جاده را از طریق یک مسیر راهنمای مغناطیسی دنبال می کنند یا روبات های کارگر که در کارخانه ها مسیر مشخصی را از طریق خطوط رنگی حک شده بر کف ان طی می کند می شود.
روبات تعقیب خط روباتی ایده ال برای روبات سازان اماتور می باشد. حس کردن خط و واداشتن روبات به حرکت بر روی ان به همراه اصلاح دائمی حرکت های نادرست از طریق یک مکانیزم فیدبک یک حلقه بسته ساده را ایجاد میکند.
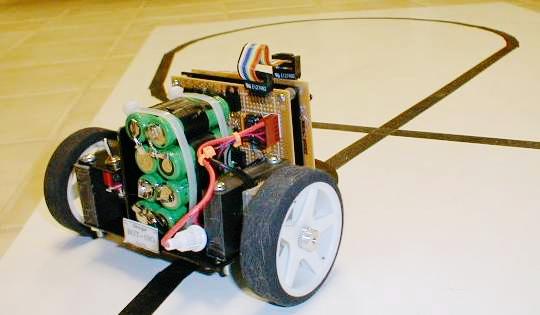
صورت مسئله ساخت روبات تعقیب خط در مسابقات مختلف دارای جزئیات زیاد و بعضا متفاوتی است اما اصل موضوع در همه انها این است که روبات باید بتواند یک خط مشکی به عرض ۱٫۸ سانتی متر(معمولا چسب برق) را در یک صفحه سفید دنبال کند.یعنی وقتی در ابتدای خط مشکی تنظیم و سپس روشن شود بدون نیاز به دخالت کاربر به دنبال خط مشکی حرکت کند در شکل بالا روباتی که قصد ساختن ان را داریم به همراه مسیر ان مشاهده می شود.
البته در بعضی روبات های پیشرفته تر نیازی به تنظیم کردن روبات روی خط مشکی نیست و خود روبات به صورت هوشمند خط را پیدا می کند که این بخاطر برنامه خوب نوشته شده برای میکرو ان توسط سازنده است. در روباتی که در این مقاله ساخته می شود سعی شده است این اصل رعایت شود.
فهرست
۱-۱ روبات تعقیب خط چیست ۱
۱-۲ بلوک دیاگرام یک روبات تعقیب خط ۳
۱- ۳ عملکرد روبات تعقیب خط ۵
۲- ۱سنسورهای روبات تعقیب خط ۹
۲- ۲ سنسور CNY70 ۱۴
۲-۳ تعداد سنسورها ۱۶
۳-۱تبدیل و انتقال خروجی سنسور به مدار پردازشگر ۲۲
۳-۱-۱مدار سوییچینگ ۲۳
۳-۱-۲مدار ترانزیستوری ۲۶
۳-۱-۳مدار اشمیت تریگر ۲۷
۳-۱-۴تبدیل خروجی آنالوگ سنسور به ولتاژ دیجیتال به کمک A / D ۳۰
۳-۱-۵ مدار سوییچ با آپ امپ ۳۱
۳-۲آشنایی با تقویت کننده های عملیاتی (Opamp): ۳۲
۳-۲-۱اتصالات تغذیه تقویت کننده های عملیاتی ۳۳
۳-۲-۲ ولتاژ تفاضلی تقویت کننده های عملیاتی: ۳۴
۳-۲-۳ اشباع ۳۶
موتور و مدارهای کنترل ۴۱
۴-۱موتور DC ۴۲
۴-۱-۱مدار کنترلی آرمیچر ۴۴
۴-۲موتور پله ای ( Stepper Motor ) ۴۶
۴-۳ درایور ها (راه انداز) ۵۷
۴-۴آی سی های درایور موتور L293B , 754410 یا L293D ۶۵
۴-۵ مقدار جریان ماکسیمم یک سیم ۷۰
۴-۶مدولاسیون پهنای پالس PWM ۷۱
۴-۷آی سی های دیگر برای راه اندازی موتور پله ای ۷۷
۴-۸حسگر جریان و محافظت در برابر اضافه جریان ۷۹
۴-۹طول و عمر موتور ۷۹
۴-۱۰حفاظت در برابر اضافه حرارت ۷۹
۴-۱۱شناسایی موانع ۸۰
۵-۱مدار منطقی ۸۲
۵-۲میکروکنترلر ۸۴
۵-۳BASCOM ۹۳
منابع ۱۱۴
![]()
![]() فرمت فایل: WORD
فرمت فایل: WORD
![]()
![]() تعداد صفحات: 120
تعداد صفحات: 120
مطالب مرتبط